Latest Update about our project

21/06/2024
Creation of a drive with photos and videos of flight tests
All Updates
21/06/2024
Drive with pictures of the project
Creation of a drive with photos and videos of flight tests
14/06/2024
GUI
Fixed the 403 Error: Forbidden that indicated that the request to the Nominatim OpenStreetMap API was being blocked by adding a User-Agent header to the HTTP request.
07/06/2024
GUI
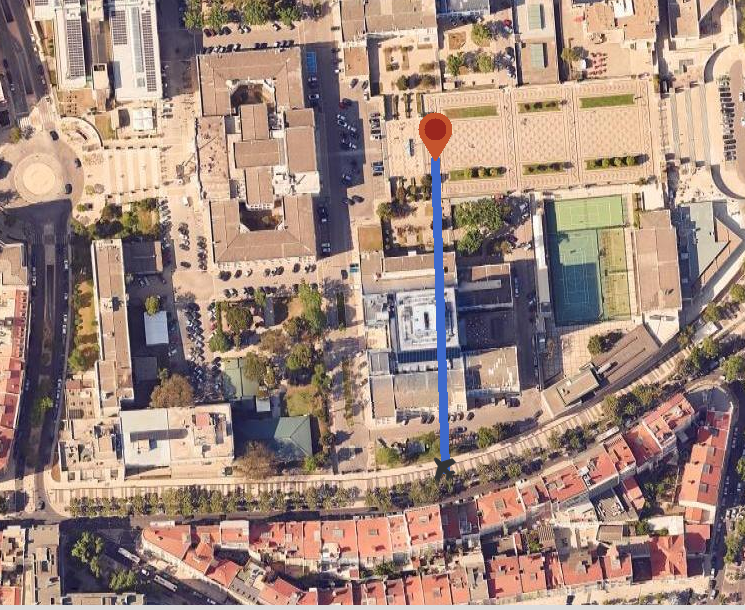
On the map, when the user places a marker, they can see a blue line connecting the plane and said marker.
02/06/2024
GUI
In the map, the user can now see the airplane icon in its initial position.
Implementing line that shows the path from the airplane icon to its destination on the map.
01/06/2024
Drone tests
The team performed more flight tests: in manual, semi-automatic and automatic mode.

31/05/2024
Operative System
Performance tests to ensure everything was working correctly
28/05/2024
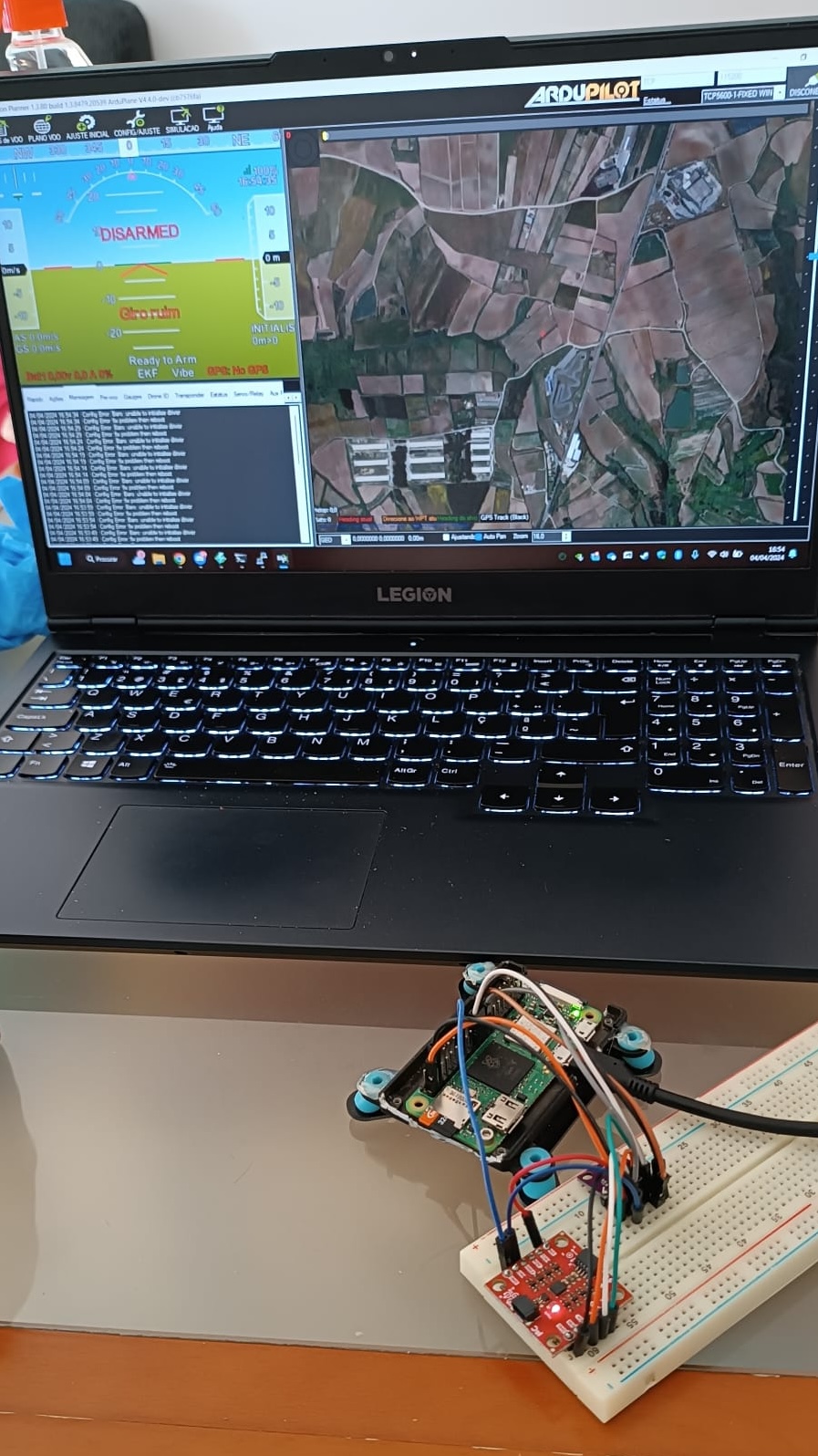
Drone tests
First test flight carried out
Flight test in automatic mode
Some problems with communication between test radios
Preparing for the implementation of the GUI

26/05/2024
GUI
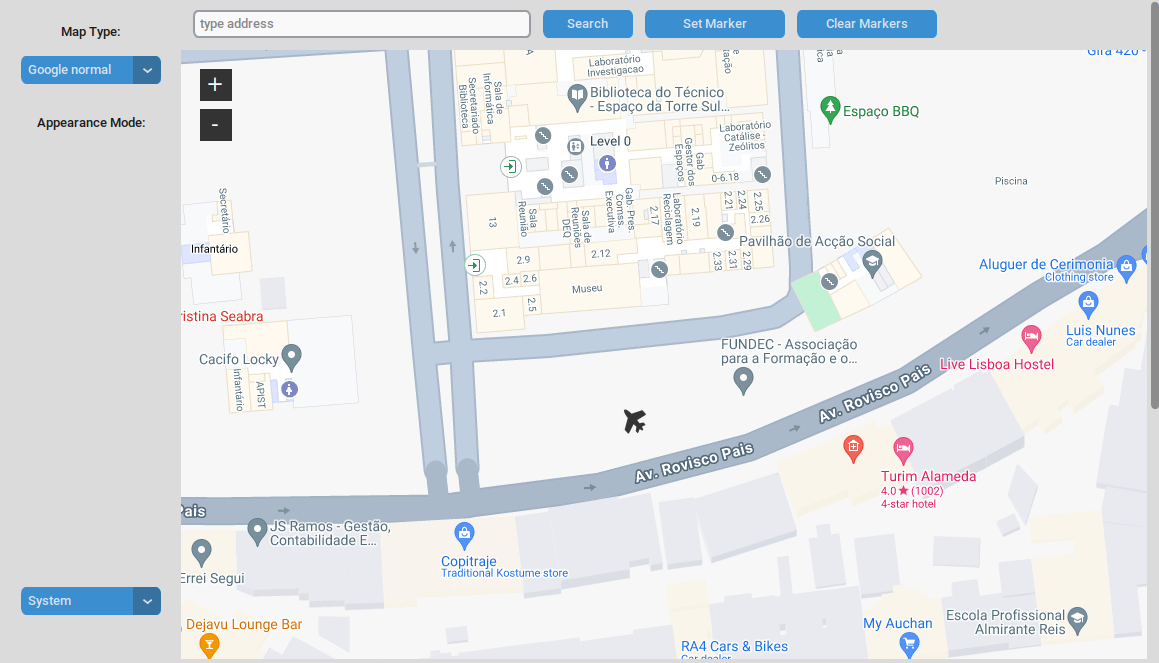
New map feature implemented: when the user clicks on the map, the coordinates of the place he clicked appear in the search bar above. After this he can make the plane move to the selected coordinates.
Problems regarding the new added feature "Set Marker" on the map, as it doesn't set the marker in the right place, it's set slightly above it.
Added the Mavlink functions to the data section, to display the airplane's data, like, for example, its velocity.

24/05/2024
Operative System
Patch, compilation e installation of the image
19/05/2024
GUI
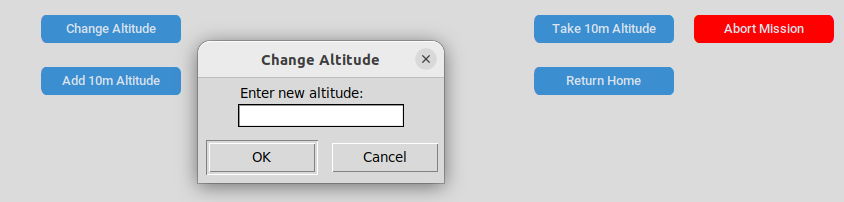
It was implemented the buttons area on the GUI. The user can now change the airplane's altitude or make it return home.
Mavlink functions were implemented related to the "Return Home" and "Abort Mission" buttons in the GUI.
Connection tests with the GUI and Mavlink functions.
18/05/2024
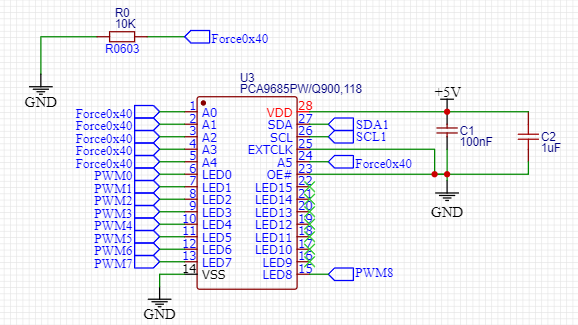
Assembly of electronic components
Solving the I2C communication problem
Assembly of the rest of the non-critical components
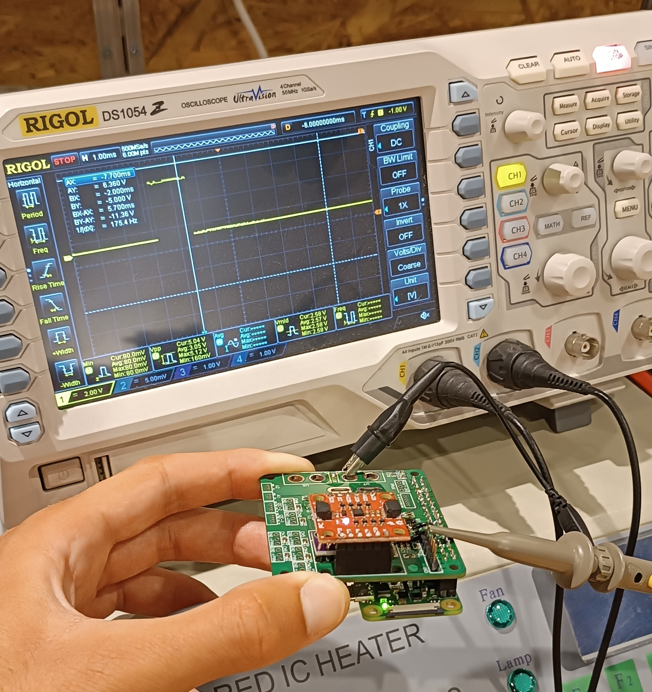
Bench test of the first fully functional prototype
17/05/2024
Operative System
Configuration and build of the kernel (manages system resources and communication between hardware and software components)
11/05/2024
Prototyping material and component assembly
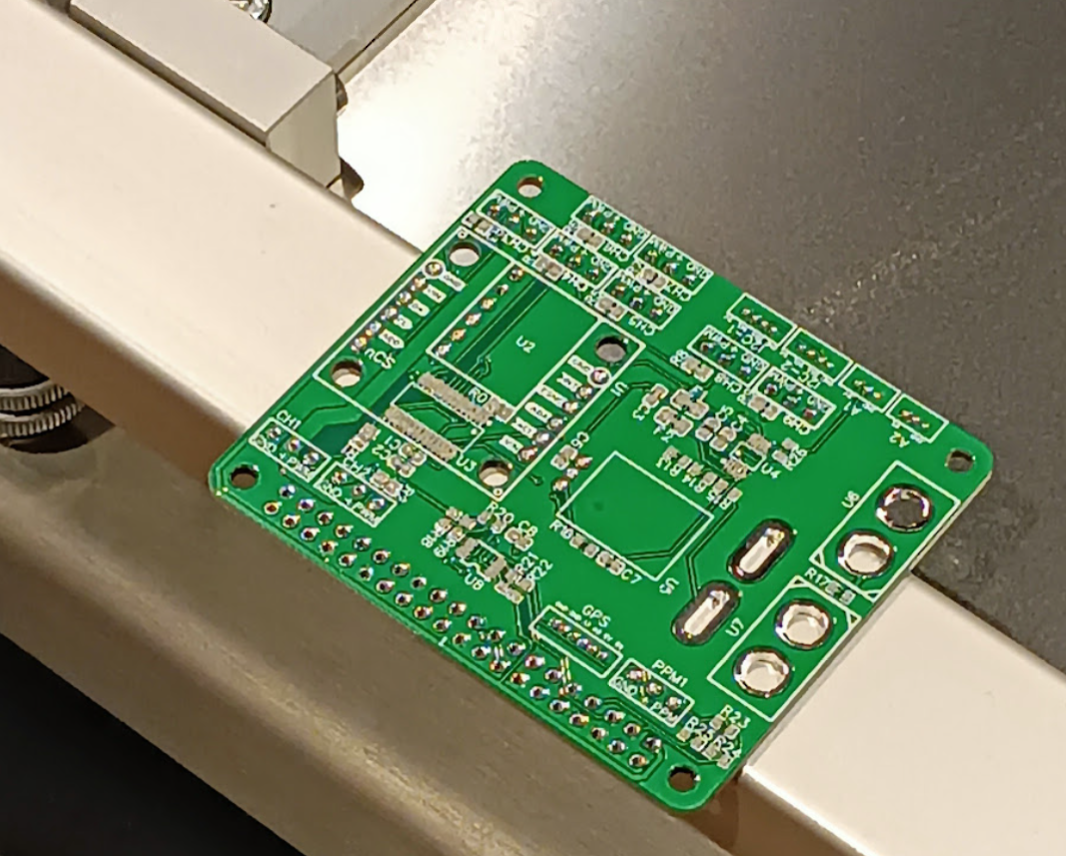
Arrival of PCBs
Start of assembly of critical components
I2C communication problems
05/05/2024
GUI
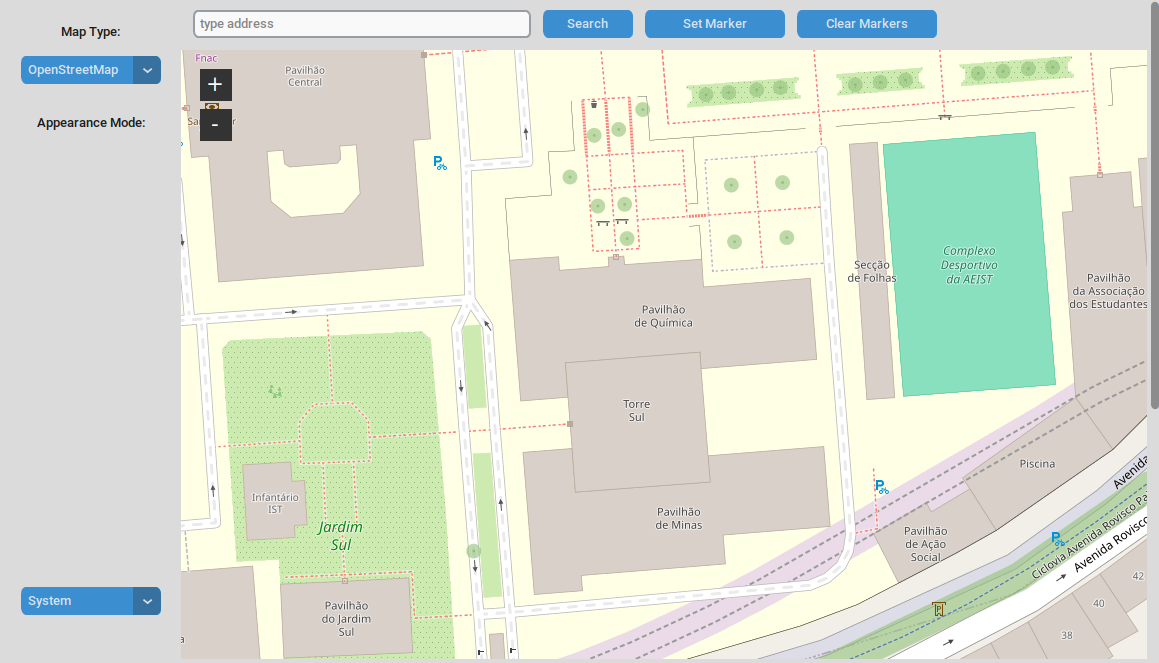
It was implemented the map area on the GUI. The user can now see a map and choose its type (OpenStreetMap, Google normal or Google Satelite) and it can search for a specific place, whether using addresses or coordinates.
Mavlink functions and tests.
28/04/2024
GUI
GUI base design: the team members tasked with the GUI divided it into four areas: the camera feed, for the live feed that the airplane will transmit; the map area, where the users will be able to see an airplane icon move along the map; the data section that will show the users the airplane's data like its velocity; And finally the buttons that will allow the users to change the airplane's altitude or make it return home.
20/04/2024
Prototyping material and website
Added team member's linkedin to the website
19/04/2024
Prototyping material and website
New website feature added: portuguese version of the website
Submission of the file for manufacture Prototyping material
Arrival of new components (Raspberry PI, sensors and PCB components)
17/04/2024
Seminar
Seminar about the "Electrical and Computer Engineering Innovators"
04/04/2024
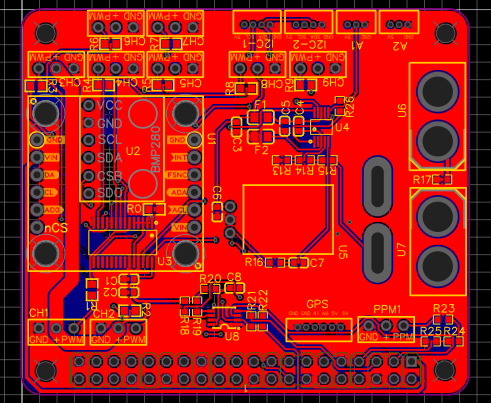
PCB'S design
-Conversion from schematic to PCB
-Component placement
-Connections between components
30/03/2024
Eletronics
In the last work sessions, the team members responsible for the area related to the eletronics part of the project completed, with success, the test that validates the correct performance of the two most important sensors of the flight control (IMU and barometer)
In this context, the IMU (inertial measure unit) supplies data of spacial position for the flight controller's algorithm trajectory corrections of the aircraft to fulfill the established goals. The barometer serves the same purpose but only for measuring altitude relative to mean sea level by means of atmospheric pressure.
The positive result of this test indicates that the communication and data synchronization between the sensors and the real-time operating system configured by those responsible for it is working properly.
29/03/2024
Website
Added team members' photos
20/03/2024
Schematic design
-Sensor circuit sizing
-Sensor interconnection completed
-Final version ready for PCB design
18/03/2024
Seminar
Seminar about The Art of Prototyping: "Building the Blueprint for Product Development Sucess"
17/03/2024
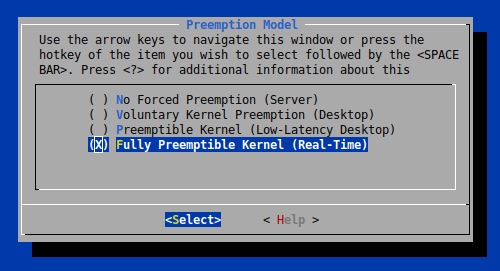
Operating system (OS) configurations:
Patching and configuration of an ARM 32-bit Linux OS, with the intention of being able to operate in real-time (Real-Time Kernel).
This configuration is responsable for mantaining the stability of the processes that are executed in a concurrent environment inside the system.
We especially want to ensure that no process has the possibility of trigger a blocking and that with more sensitive operations, like sensor readings and actuator control, are performed in very specific time windows.
7/03/2024
Meetings and prototyping material
Meeting with the 6 members of the team and discussion regarding the next steps of the project: website remodeling and OS configurations
The list of materials required for the development of the project was submitted
6/03/2024
Seminar
Seminar about The Power of Teamwork: "Pratical Techniques for Team Organization"
28/02/2024
Sensor testing
Sensor testing and compatibility (IMU and Barometer)
21/02/2024
Seminar
Seminar about Design Thinking: "A session about alternative ways to think about alternatives"