Última atualização sobre o nosso projeto

21/06/2024
Criação de uma drive com fotos e vídeos dos testes de voo
Todas as Atualizações
21/06/24
Drive com fotos do projeto
Criação de uma drive com fotos e vídeos dos testes de voo
14/06/2024
GUI
Corrigiu-se o erro 403: Forbidden que indicava que o pedido à API do Nominatim OpenStreetMap estava a ser bloqueado, adicionando um cabeçalho User-Agent ao pedido HTTP.
07/06/2024
GUI
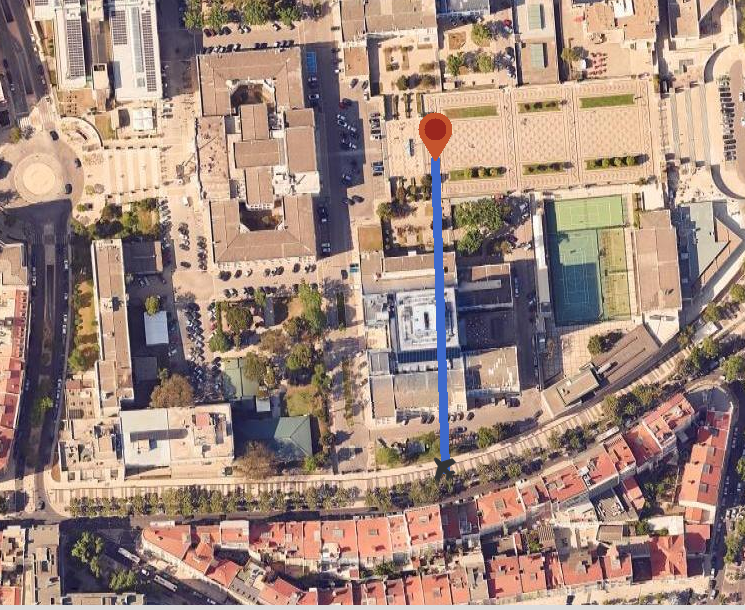
No mapa, o utilizador quando posiciona um marcador, consegue visualizar uma linha azul que conecta o avião e o marcador.
02/06/2024
GUI
No mapa, o utilizador pode agora ver o ícone do avião na sua posição inicial.
Adicionou-se a linha que mostra a trajetória do avião ao mapa.
01/06/2024
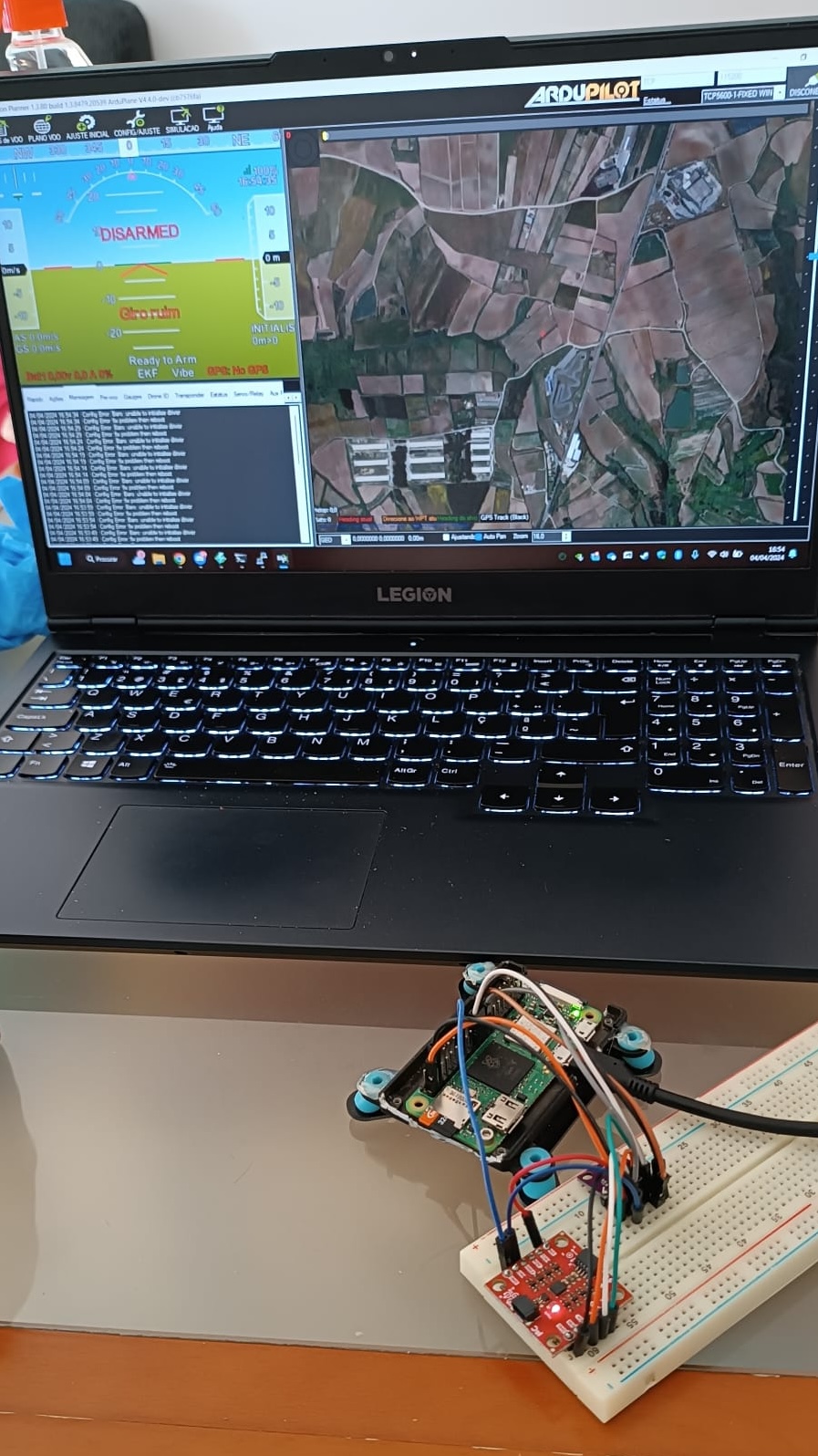
Testes com o drone
A equipa realizou mais testes de voo: em modo manual, semi-automático e automático.

31/05/24
Sistema Operativo
Testes de performance para garantir que estava tudo a funcionar corretamente
28/05/2024
Testes com o drone
Realização do primeiro voo de teste
Realização de um segmento de voo em modo automatico
Alguns problemas na comunicação entre radios de teste
Preparação para a implementação da GUI

26/05/2024
GUI
Foi implementada a funcionalidade do mapa em que, se o utilizador clicar no mapa, as suas coordenadas aparecem na barra de pesquisa acima.
Problemas no "Set Marker" do mapa relativamente às novas funcionalidades adicionadas, em que não coloca o marcador no seu local específico, mas sim ligeiramente acima do local clicado.
Adicionadas as funções Mavlink à secção de dados, para mostrar os dados do avião, como, por exemplo, a sua velocidade.

24/05/24
Sistema Operativo
Patch, compilação e instalação da imagem
19/05/2024
GUI
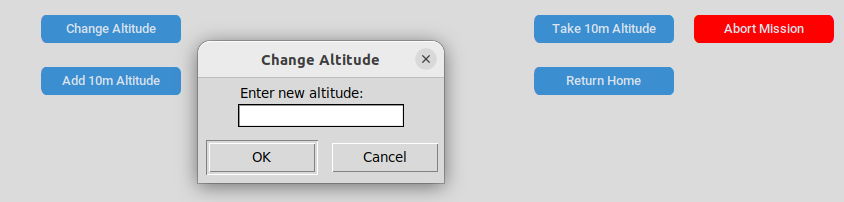
Foi implementada a área de botões na GUI. O utilizador pode agora alterar a altitude do avião ou fazê-lo regressar a casa.
As funções Mavlink foram implementadas e fez-se a ligação entre as funções e os botões da GUI.
Testes de ligação com as funções do Mavlink e GUI.
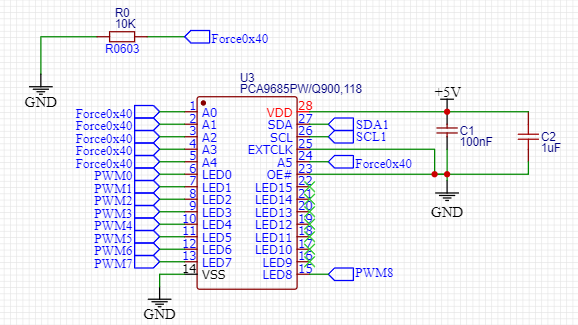
18/05/2024
Montagem dos componentes eletrónicos
Resolução do problema de comunicação I2C
Montagem do resto dos componentes não criticos
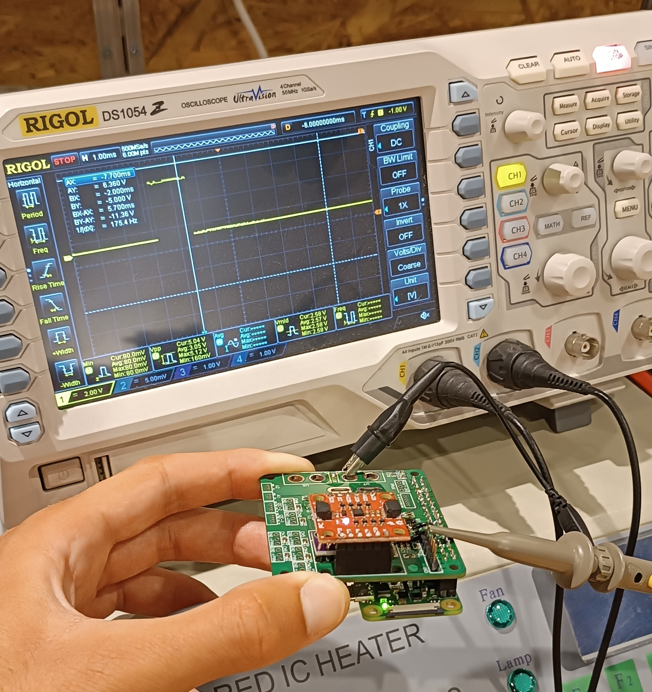
Teste de bancada do primeiro prototipo completamente funcional
17/05/24
Sistema Operativo
Configuração e construção do kernel (responsável por gerir os recursos do sistema e por fazer a comunicação entre componentes de hardware e software)
11/05/2024
Material de prototipagem e montagem dos componentes
Chegada dos PCBs
Inicio da montagem dos componentes críticos
Problemas na comunicação I2C
05/05/2024
GUI
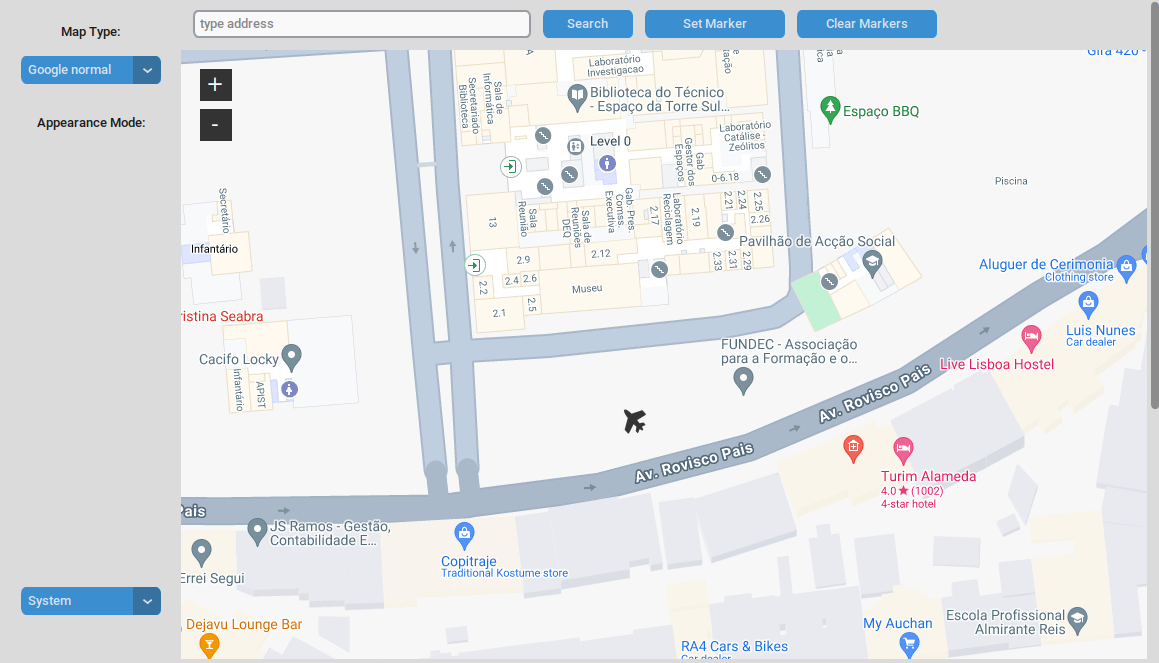
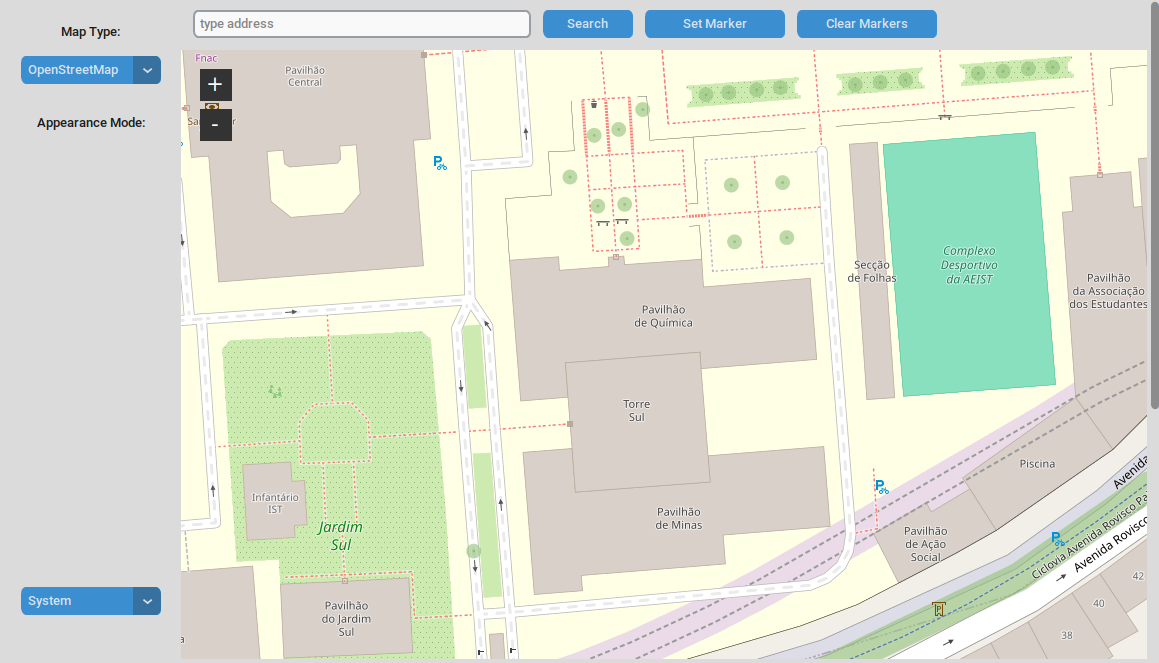
Foi implementada a área do mapa na GUI. O utilizador pode agora ver um mapa e escolher o seu tipo (OpenStreetMap, Google normal ou Google Satelite) e pode procurar um local específico, quer utilizando endereços ou coordenadas.
Funções do Mavlink e testes das mesmas.
28/04/2024
GUI
Design base da GUI: os membros da equipa encarregues da GUI dividiram-na em quatro áreas: a área da câmara, para a imagem em direto que o avião irá transmitir; a área do mapa, onde os utilizadores poderão ver o ícone do avião a mover-se ao longo do mesmo; a secção de dados, que mostrará aos utilizadores os dados do avião, como a sua velocidade; e, finalmente, os botões que permitirão aos utilizadores alterar a altitude do avião ou fazê-lo regressar a casa.
20/04/2024
Material de prototipagem e website
Adicionou-se o linkedin dos membros da equipa
19/04/2024
Material de prototipagem e website
Nova funcionalidade adicionada ao website: versão portuguesa do website
Submissão de ficheiro para fabrico Material de prototipagem
Chegada de novos componentes (Raspberry PI, sensores e componentes para a PCB)
17/04/2024
Seminário
Seminário sobre "Electrical and Computer Engineering Innovators"
04/04/2024
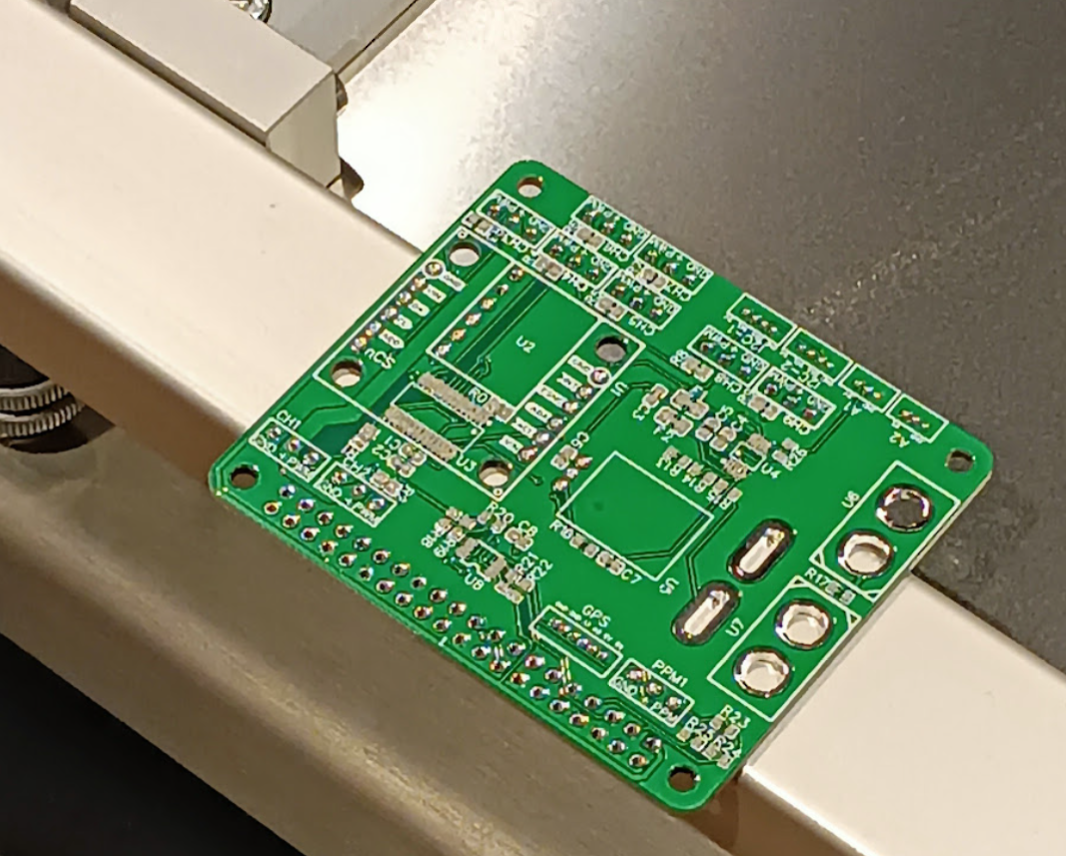
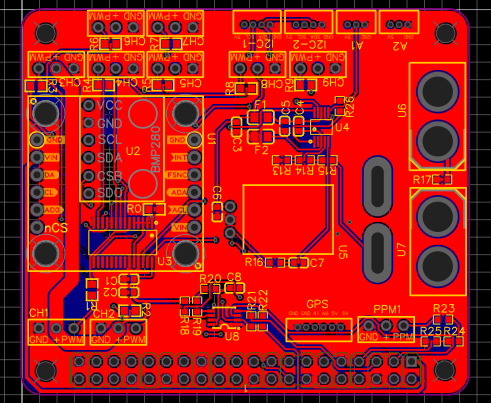
Design do PCB
- Conversão do schematic para o PCB
- Posicionamento de componentes
- Ligações entre componentes
30/03/2024
Eletrónica
Nas últimas sessões de trabalho, os membros responsáveis pela área relacionada à eletrónica completaram com sucesso o teste que valida o correto funcionamento dos dois sensores mais importantes do controlador de voo (IMU e Barómetro).
Neste contexto, a IMU (Inertial measurement unit) fornece dados de posição espacial para o algoritmo de controlo de voo calcular correções de trajetória da aeronave para cumprir os objetivos definidos. O barómetro serve o mesmo propósito, mas apenas para efeitos medição da altitude relativa ao nível médio da água do mar por meio da pressão atmosférica.
O resultado positivo deste teste é indicativo de um bom funcionamento da comunicação e sincronização de dados entre os sensores e o sistema operativo de tempo real configurado pelos responsáveis do mesmo.
29/03/2024
Website
Adicionou-se as fotos dos membros da equipa
20/03/2024
Design do esquema
-Dimensionamento de circuitos dos sensores
-Interligação de sensores concluída
-Versão final pronta para design do PCB
18/03/2024
Seminário
Seminário sobre A Arte da Prototipagem: "Building the Blueprint for Product Development Sucess"
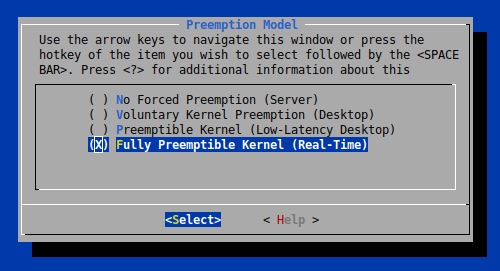
17/03/2024
Configurações do sistema operativo (SO):
Patching e configuração de um sistema operativo Linux ARM 32-bit, com o objetivo de poder funcionar em tempo real (Real-Time Kernel).
Esta configuração é responsável por manter a estabilidade dos processos que são executados num ambiente concorrente dentro do sistema.
Queremos sobretudo garantir que nenhum processo tem a possibilidade de desencadear um bloqueio e que as operações mais sensíveis, como as leituras dos sensores e o controlo dos actuadores, sejam realizadas em janelas de tempo muito específicas.
7/03/2024
Reunião e material de prototipagem
Reunião com os 6 membros da equipa e discussão sobre as próximas etapas do projeto: remodelação do sítio Web e configurações do sistema operativo
Foi submetida a lista de material necessária para o desenvolvimento do projeto
6/03/2024
Seminário
Seminário sobre O Poder do Trabalho em Equipa: "Pratical Techniques for Team Organization"
28/02/2024
Teste de sensores
Teste e compatibilização de sensores (IMU e Barómetro)
21/02/2024
Seminário
Seminário sobre Design Thinking: "A session about alternative ways to think about alternatives"